https://ja.wikipedia.org/wiki/%E5%80%92%E7%AB%8B%E6%8C%AF%E5%AD%90
DCモーターを9軸センサーの2軸を使って 制御します。
水曜日ポチッておいたのが届きました。

タミヤのダブルギヤセット(モーター2個付)や基板にタイヤ、
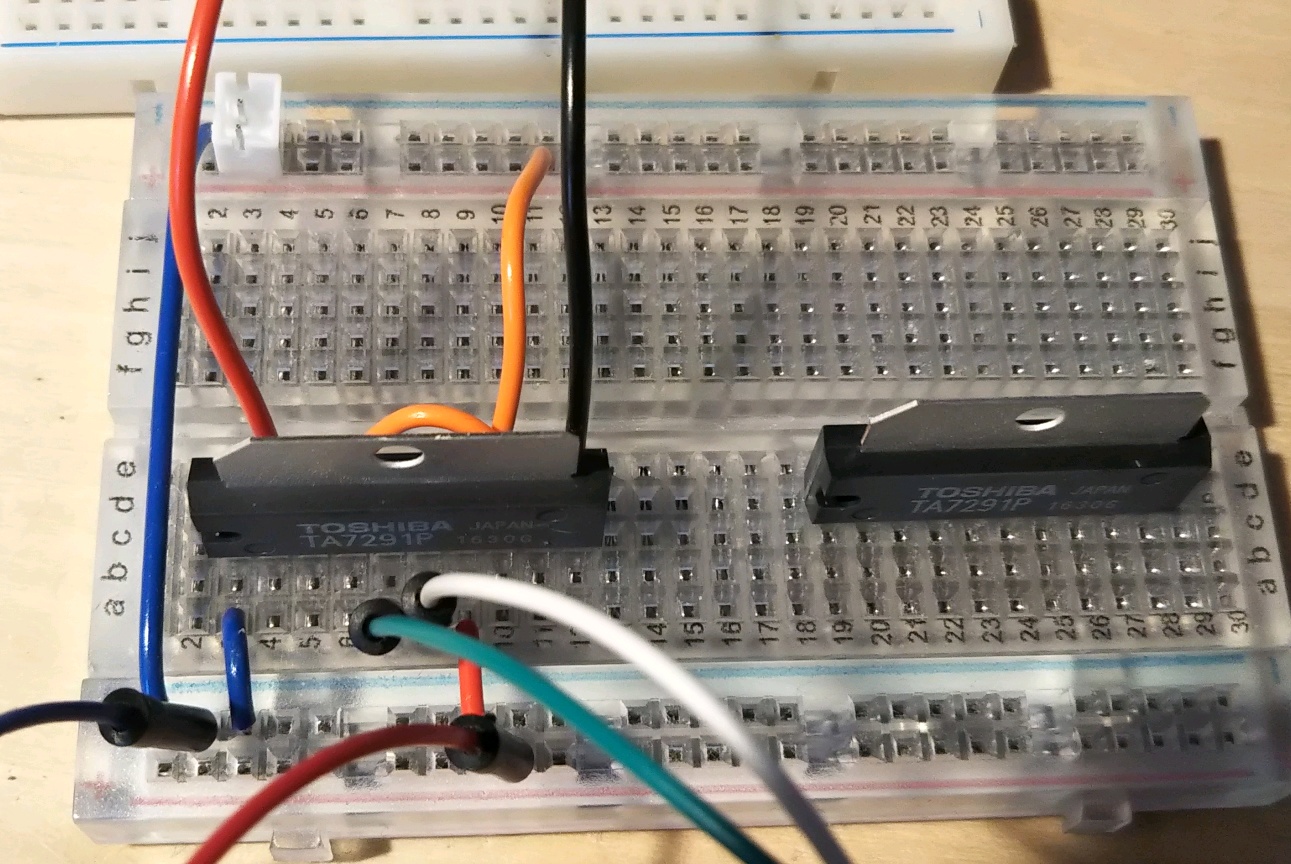
DCモーターの制御はTA7291Pで行います。

エネループ1.2V×3→3.6Vでコントローラ損失が2Vということで、モーターは1.6V駆動となります。トルクが足りないときは、エネループ1本追加です。

先人の知恵としてこの辺のページが参考になります。
TA7921pの説明はこちら。
https://www.marutsu.co.jp/contents/shop/marutsu/mame/81.html
半日でつくる倒立振子というナイスな先人もいます。
https://www.instructables.com/id/%E5%8D%8A%E6%97%A5%E3%81%A7%E4%BD%9C%E3%82%8B%E5%80%92%E7%AB%8B%E6%8C%AF%E5%AD%90/
倒立振子の運動方程式とか状態方程式は、ググルと沢山出てきます。
制御工学実装の基本のようで、いろいろな制御方法があります。
まずは、モーター単体を回転させるべく、配線等を行います。
ESP32からは、3本必要です。
IO2 PWM出力 モータ速度コントロール
IO22 0,1出力(正転、逆転、ブレーキ)
IO23 0,1出力(正転、逆転、ブレーキ)
全体はこんな感じです。ESP32はもう1個買って専用にしないとだめですね。


早すぎてわからないので、ギヤボックスを入れます。ギヤ比は114.7:1を選択しました。
正回転と逆回転を3回繰り返します。
とりあえず、今週はこの辺までにしておきます。




倒立振子に必要な要素が、だいぶそろってきましたね。
返信削除注文していた速いモータが届いたので、早速実験してみました。https://www.youtube.com/watch?v=coYSWYs3CAY
ステッピングモータは、5Vでは馬力不足のようで、昇圧電源もアマゾンへ注文しました。
だいぶ進みました。一つづつ確認してると時間がかかります。もう少しですかね。
削除ステッピングモータも簡単にはいきませんね。